Der Beaglebone Black (BBB) hat als als zentrales Rechenwert (CPU, central processing unit) ein System auf einem Chip (SoC, system on chip). Dieser SoC wird von der Firma Texas Instruments (TI) hergestellt. TI unterstützt die beagleboard.org Gemeinschaft. Der SoC von TI hat die Chip-Bezeichnung AM335x, wobei x die Ziffer 8 oder 9 haben kann, je nach Platinentyp (Board). Der Hauptprozessor des BBB basiert auf einer ARMv7 Architektur auf dem das Linux Betriebssystem läuft. Der ARMv7 Kern taktet mit 900 MHz. Der SoC hat aber auch noch zwei weitere Prozessoren die als programmierbare Echtzeit Einheiten (PRU, programmable realtime unit) bezeichnet werden und mit 200 MHz takten. Mein Board hat übrigens die Bezeichnung "BCB Rec B6". Als Betriebssystem verwende ich Debian, das ich als fertiges Image aufgespielt habe (BBB-eMMC-flasher-debian-7.8-lxde-4gb-armhf-2015-03-01-4gb. img).
Der BBB hat gegenüber anderen Einplatinencomputern, wie z.B. dem bekannten Raspberry Pi, den Vorteil, dass er über bis zu 8 analoge Eingänge (ADC, analog/digital converter) verfügt. Die ADC - Eingänge lassen sich einfach ansprechen, wenn das Betriebssystem über sogenannte device trees erweitert wird. Alle Hardware Aktionen benötigen root Rechte. Daher empfiehlt es sich die folgenden Befehle und Programme als root auf der Kommandozeile auszuführen mit dem Befehl:
sudo su
Die Aktivierung der analogen Eingänge AIN-0 bis AIN-7 erfolgt dann mit dem Befehl:
echo BB-ADC > /sys/devices/bone_capemgr.*/slots
Es empfiehlt sich jetzt die Datei slots mal anzusehen. Hier sollte am Ende der entsprechende Eintrag zu finden sein.
Jetzt kann man ganz einfach auf der Kommandozeile einen analogen Eingang, z.B AIN-0 abfragen. Dazu liest man die neu angelegte virtuelle Datei des Analogeingangs aus. Das geschieht mit dem Befehl:
cat /sys/bus/iio/devices/iio::device0/in_voltage0_raw
Es wird daraufhin ein zufälliger Werte zwischen 0 und 4096 angezeigt, denn der BBB ADC hat eine12- bit Auflösung. Dabei entspricht 0 einer gemessenen Spannung von 0 Volt und 4096 einer Spannung von 1,8 Volt.
Bis jetzt haben wir noch nichts an den BBB angeschlossen. Das ist auch gut so, denn hier muss man sehr vorsichtig sein, um den BBB nicht nachhaltig zu beschädigen, denn Spannungen an den Analog-Eingängen die außerhalb des Bereichs 0 bis 1,8 Volt liegen, können Schäden am SoC anrichten. Die verwendbaren PINs für analog Schaltungen sind alle auf der P9 Buchsenleiste des BBB zu finden und sind auszugsweise in der folgenden Liste aufgeführt:
| ____ | |||||
| digital GNG | 01 | |OO| | 02 | digtital GND | |
| DC 3,3 Volt | 03 | |OO| | 04 | DC 3,3 Volt | |
| VDD 5 Volt | 05 | |OO| | 06 | VDD 5 Volt | |
| . | |||||
| . | |||||
| . | |||||
| 31 | |OO| | 32 | VADC 1,8 Volt | ||
| AIN-4 | 33 | |OO| | 34 | analog GND | |
| AIN-6 | 35 | |OO| | 36 | AIN-5 | |
| AIN-2 | 37 | |OO| | 38 | AIN-3 | |
| AIN-0 | 39 | |OO| | 40 | AIN-1 | |
| 41 | |OO| | 42 | |||
| digital GND | 43 | |OO| | 44 | digital GND | |
| digital GND | 45 | |OO| | 46 | digital GND | |
| ------ |
Will man sich schnell verändernde Signal an den Analogeingängen ansehen, kommt man mit dieser Methode nicht weiter, da sie zu langsam ist. Hier ist der Einsatz der PRUs gefragt, die unabhängig vom Betriebssystem die ADC-Werte in Echtzeit in den Speicher einlesen können. Von dort können sie dann von einem Programm ausgelesen werden. Das Programmieren der PRUs ist eine Sache für sich und eigentlich nicht ganz einfach, gäbe es nicht eine gute C-Bibliothek von Thomas Freiherr, die wir nutzen werden. Um die PRUs zu verwenden, muss zunächst das original PRU Treiber Paket auf den BBB mit dem Befehl:
apt-get install am335x-pru-package
geladen werden. Die Aktivierung des PRU- Pakets erfolgt ebenfalls auf der Kommandozeile mit dem Befehl:
echo BB-BONE-PRU-01 > /sys/devices/bone_capemgr.*/slots
Die Programmierung der PRUs wurde uns in dankenswerter Weise von Thomas Freiherr abgenommen, der uns die Bibliothek libpruio in der gegenwärtigen Version 2.0 auf der Plattform:
https://www.freebasic-portal.de/downloads/fb-on-arm/
unter der LGPLv2 Lizenz ( http://www.gnu.org/licenses/lgpl-2.0.html) zur Verfügung stellt. Leider ist die Beschreibung von libpruio etwas kryptisch und auch nicht in erster Linie für C-Programme gedacht.
Lädt man jetzt die komprimierte Datei libpruio-2.0.tar.bz2 herunter und dekomprimiert sie, findet man unter …/libpruio-0.2/scr/c_wrapper die Bibliothek libprio.so und die dazugehörige Header-Datei pruio.h sowie pruio.hp . Mit dem Shell-Skrip install.sh , dass sich ebenfalls im c_wrapper Verzeichnis befindet, werden diese Datei nach /usr/local/lib/ bzw. /usr/local/include/ kopiert, root Rechte natürlich immer noch vorausgesetzt (siehe oben). Will man in seinem C-Programm die Bibliothek nutzen, muss man beim Kompilieren des C-Programms die Bibliothek explizit mit angeben. Das Beispiel, dass uns Thomas Freiherr unter:
…./libpruio-0.2/scr/c_examples/1.c
zur Verfügung stellt, wird mit:
gcc -Wall -o 1 1.c -lpruio
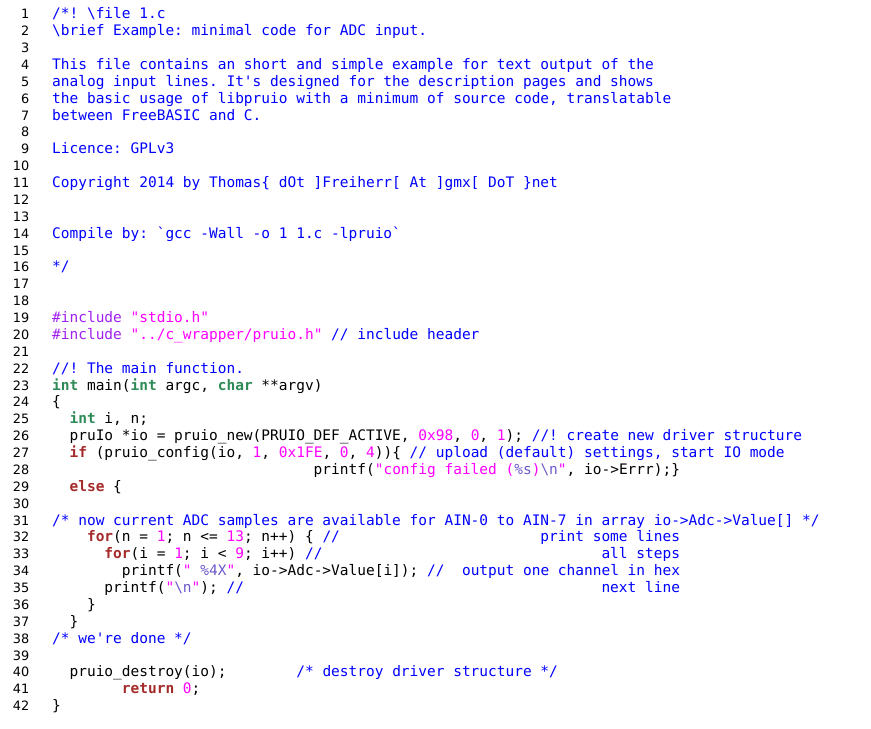
kompiliert. Der Befehl gcc ruft den C- Compiler auf. Die Option -Wall w eist den Compiler an, alle auftretenden Warnungen an zuzeigen. Das ist für die ehleranalyse ganz nützlich. Die Option -o weist den C ompiler an, de n nachfolgende n Name als Programmname n zu verwenden. In diesem Fall soll das Programm einfach nur 1 heißen. Man kann die Option -o auch weglassen, dann wird der Standardname (default) a.out verwendet. Nachfolgend wird die zu kompilierende Quelldatei angegeben (hier 1.c). An dem c hinter dem Punkt des Quelldateinamens erkennt der gcc, dass ein C-Programm übersetzt werden soll. Das die Bibliothek libpruio.so eingebunden werden soll erkennt der gcc an -lpruio. Das „lib“ am Namensanfang der Bibliothek und das „.so“ am Ende werden nicht angegeben, dafür wird ein „-l“ vorangestellt (zugegeben eine etwas dämliche Konvention). Der Quellcode des Programms 1.c sei hier einmal vollständig wiedergegeben.
Hier wird die Headerdatei pruio.h geladen, die das Interface zur Nutzung der Bibliothek libpruio.so benötigt.
Durch pruio.h ist die Struktur pruIo bekannt auf die der Zeiger *io zeigt. Dieser zeigt auf die Initialisierung der PRU. Die Parameter der Funktion:
pruio_new(uint16 Act, uint8 Av, uint32 OpD, uint8 SaD)
werden hier im einzelnen beschrieben:
Act ist eine 16bit-Maske und aktiviert die Subsysteme der PRUs. Das enum PRUIO_DEF_ACTIVE hat den Hex-Wert 0xFFFF oder Binär b111111111111111 und aktiviert alle Subsysteme. In diesem Fall ist das eigentlich nicht notwendig, da wir nur den ADC verwenden. Es würde auch ausreichen hier einfach das enum PRUIO_ACT_ADC (= 1<<1) zu verwenden um die Benutzung der ADC durch die PRU-0 zu aktivieren.
Av gibt an, über wie viele Schritte gemittelt werden soll. Steht hier ein hoher Wert, z.B. 0xFF, wird die Messung sehr genau, dafür aber langsam.
OpD gibt an, wie lange es braucht, bis die erste Messung erfolgen soll. Hier sind Werte zwischen 0 und 0x3FFFF erlaubt. Ist der Wert zu hoch, liest das C-Programm bereits den Speicherplatz aus, bevor die Messung durch den PRU gestartet ist. Dann stehen im Speicher die Initialisierungs-Nullen. Der vorgeschlagene Wert ist 0x98.
SaD gibt die Wartezeit für die Messschritte an. Werte zwischen 0 und 255 sind erlaubt. Der Vorschlag ist 0.
Hier wird die Funktion:
char* pruio_config(pruIo* Io, uint32 Samp, uint32 Mask, uint32 Tmr, uint16 Mds)
aufgerufen und im Fehlerfall eine Meldung ausgegeben.
Hier wird einfach der Zeiger auf die Funktion pruio_new() auf Zeile 26 übergeben.
Samp gibt die Anzahl der Messwerte an, die in den Speicher geladen werden sollen. In dem Programm 1.c soll einfach nur eine Messung pro Kanal durchgeführt werden, daher steht hier eine 1. Maximal können 2^32 = 65535 Messungen durchgeführt werden.
Mask gibt die 32bit-Maske der aktivierten ADC Kanäle vor. Die im Beispiel eingegebene Maske 0x1FE entspricht dem Bitmuster b1 1111 1110. Es werden also alle 8 ADC Kanäle ausgelesen. Die Bedeutung der rechten 0 ist mir unklar.
Dieser Timer definiert die Sampling-Rate, also die Zeit, die zwischen zwei ADC-Messungen bleibt. Der Wert wird in Nanosekunden (ns) angegeben.
Mds gibt den Ausgabemodus an. Es gibt den Modus RB (Ring Buffer) und MM
In dieser for Schleife werden 13 mal alle ADC Werte eingelesen.
In dieser for Schleife werden die 8 ADC Werte von AIN-0 bis AIN-7 eingelesen.
Die Werte im Speicher werden mit io->ADC->Value[i] ausgelesen und auf der Konsole im 4-stelligen HEX-Format angezeigt.
Mit der Funktion pruio_destroy() wird die PRU wieder deaktiviert.
Das Programm 1.c ist schon erheblich schneller, als das Auslesen der ADCs über die virtuellen Dateien .../in_voltage0_raw . Es geht aber natürlich noch schneller. Dazu habe ich das folgende C-Programm rb_plot.c geschrieben. Das Programm liest nur noch den AIN-0 ein und zeigt das Ergebnis grafisch in GnuPlot an. Wer noch kein GnuPlot hat, sollte dies mit dem Befehl:
apt-get install gnuplot
nachholen. Die Messwerte werden zunächst in dem Array array[ ] gespeichert (Zeile 55) und in die Text-Datei output.dat (Zeile56) geschrieben. An GnuPlot werden die Messwerte über eine Pipe übergeben. Siehe hierzu die Zeilen 62, 63 und 64. Der Parameter -persistent in der Funktion popen() ermöglicht es die GnuPlot Grafik auch nach Programmende zu sehen.
Die meisten anderen Programmzeilen sind selbsterklärend oder bereits in 1.c behandelt. Daher gehe ich hier nur noch auf wenige Zeilen ein. Hier nun der Quellcode des Programms rb_plot.c :
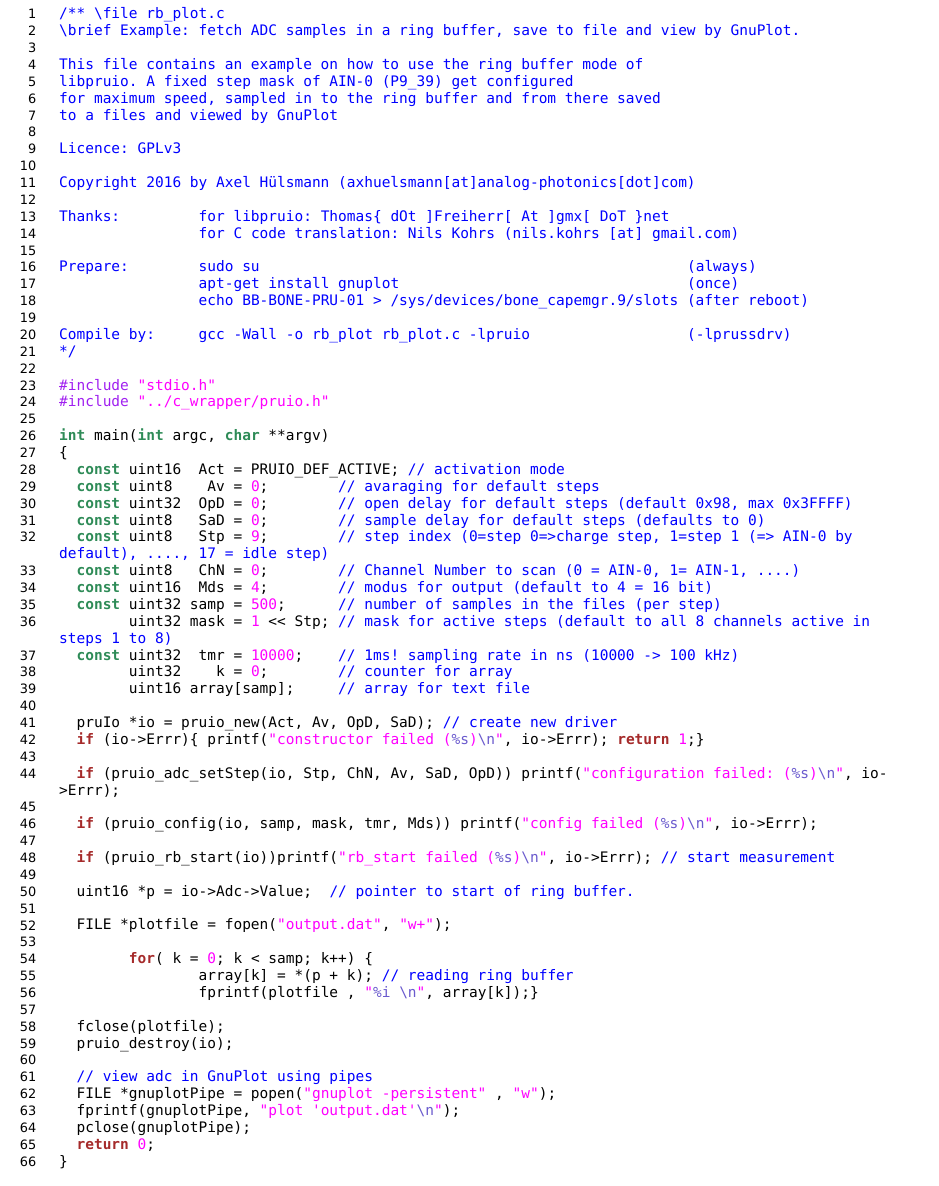
Hier wird die Funktion:
char* pruio_adc_setStep(pruIo* Io, uint8 Stp, uint8 ChN, uint8 Av, uint8 SaD, uint32 OpD)
aufgerufen und im Fehlerfall eine Meldung ausgegeben. pruio_adc_setStep() überschreibt die Werte von pruio_new().
Hier wird wieder der Zeiger auf die Funktion pruio_new() übergeben.
Stp ist der Schrittindex.
(0 = step 0 => charge step, 1 = step 1 (=> AIN0 by default), ..., 17 = idle step)
ChN ist die Kanalnummer.
Av gibt an, über wie viele Schritte gemittelt werden soll. Steht hier ein hoher Wert, z.B. 0xFF, wird die Messung sehr genau, dafür aber langsam.
OpD gibt an, wie lange es braucht, bis die erste Messung erfolgen soll. Hier sind Werte zwischen 0 und 0x3FFFF erlaubt. Ist der Wert zu hoch, liest das C-Programm bereits den Speicherplatz aus, bevor die Messung durch den PRU gestartet ist. Dann stehen im Speicher die Initialisierungs-Nullen. Der vorgeschlagene Wert ist 0x98.
SaD gibt die Wartezeit für die Messschritte an. Werte zwischen 0 und 255 sind erlaubt. Der Vorschlag ist 0.
Hier wird der Ring-Buffer gestartet
Der Pointer *p wird deklariert, der auf den Anfang des Ring-Buffers zeigt.
Die Textdatei output.dat wird geöffnet oder neu angelegt („w+“) in die die Messwerte gespeichert werden.
In der for-Schleife wird der Ring-Buffer gelesen und in das array[ ] geschrieben.
Dazu wird der Pointer *p des Ring-Buffers über k hochgezählt.
Das array[ ] wird in die Text-Datei output.dat geschrieben
Mit diesem Programm ist es immerhin möglich eine anaolg-digital Wandlung von 100kS/s zu erreichen. Schneller hab ich es bisher nicht geschafft.
Der Quellcode des Programms rb_plot.c kann hier heruntergeladen werden.
Letztes Update 13.01.2016